MP4U
8-Axis Modular EtherCAT Drive Module

- Integrated 8 EtherCAT drives and supplies
- High performance and economical type of drives
- NanoPWM™ drives (NPM3U) for sub nanometer jitter and following errors
- PWM (UDM3U) for less demanding axes
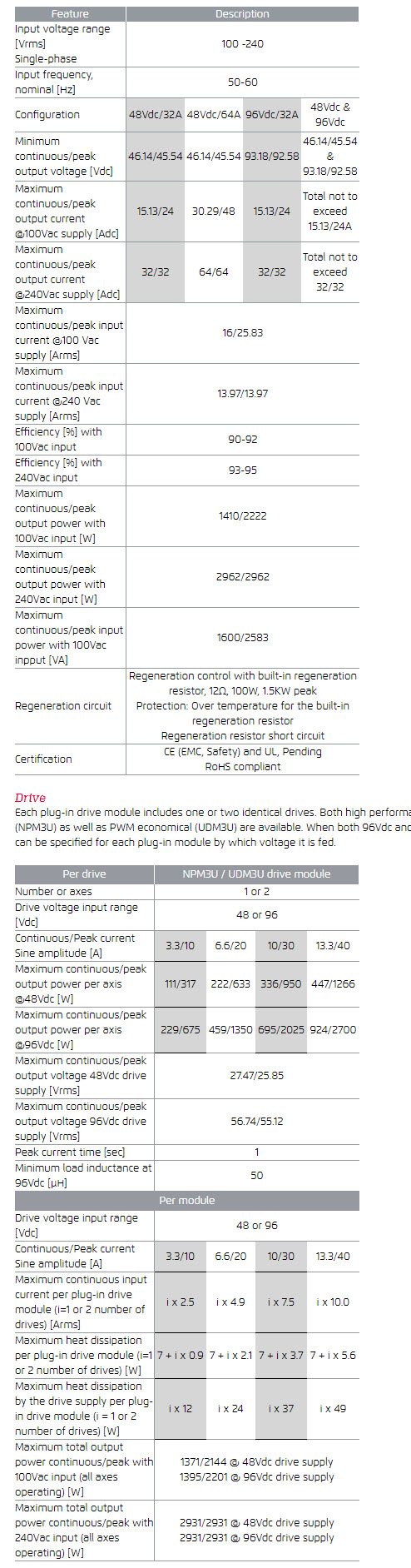
- Wide range of current and voltage
- Current: 3.3/10A to 13.3/40A (cont/peak)
- Voltage: 48Vdc and 96Vdc
- 1.6 kW and 3.2 kW power supply with AC input
- 96Vdc/32A
- 48Vdc/32A or 48Vdc/ 64A
- Both 96Vdc/32A and 48Vdc/32A
- Safe Torque Off (STO) option
- All connectors are located on the back of the enclosure
- Built-in fans draw air from the front and extract it from the back of the enclosure
- ACS field proven robustness and reliability
The MP4U is an 8-axis modular EtherCAT drive module that enables the user to tailor the specific drive for each axis. Different drives can be selected for each pair of axes as well as the power supplies. Two types of drive module can be specified: The NanoPWM™ (NPM3U) drives for the highest performance of position jitter and following error demanding axes, and the more economical PWM (UDM3U) drives for the less demanding axis. Each module (two or one axis) can be specified for 3.3/10A (cont/peak) to 13.3/40A and can be connected to either 96Vdc or 48Vdc. The power supply is made of one or two plug-in modules, each fed by a single phase AC input and generating 48Vdc/32A output. The system can be ordered with one supply module providing 48Vdc/32A or two modules, connected either in parallel and providing 48Vdc/64A, or connected in series and thus providing 96Vdc/32A as well as 48V/32A. For each of the four drive modules it can be specified by which voltage it is fed (when both 48Vdc and 96Vdc voltages are available). Each drive is available with optional motor shortening relays, absolute encoder, as well as 500kHz SIN-COS encoder interfaces. The NanoPWM™ is also available with a 10MHz SIN-COS encoder interface for laser type encoders. STO is an option that is specified for either none or for all drives.
The basic configuration consists of a power management module, which includes a logic supply that is fed by a dedicated AC input connector, and a regeneration module.
The user can select the power supply configuration, the type of each of the four drive modules, its current and which voltage (48Vdc or 96Vdc) to feed it.
(Note: Soon the MP4U will be available with an optional built-in motion controller and EtherCAT master. Consult ACS for availability. Currently it can be operated with an ACS controller, such as the SPiiPlusEC, SPiiPlusES, and any of the SPiiPlusCMxx control modules.)
Dimensions
19" Enclosure
Height [mm] 260 (6U)
Width [mm]
With no ears 440
With ears 483
Depth [mm]
Without handles 266
With handles 306
Weight [Kg]
4-axes: 11.8
8-axes: 13.3
EtherCAT® Communication
To connect to an ACS motion controller
Two ports: In and Out, 100 Mbit/sec, RJ45 connector
Accessories
PN MP4U-ACC1: 4-axes mating connectors kit
PN MP4U-Acc2: 8-axes mating conenctors kit
CE, UL (Pending), RoHS compliant
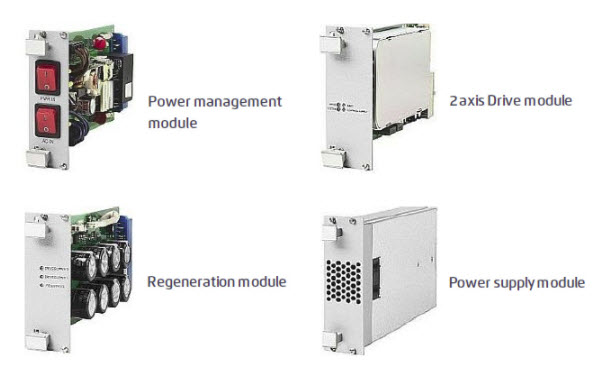
Plug-in Modules
Power Management
The MP4U is fed by two separate AC inputs. DRIVE SUPPLY
to feed the selected drive supplies and CONTROL SUPPLY to
feed the built-in 24V control supply
Drive Supply
100 to 240Vac, single-phase, 50-60Hz
Control Supply
100 to 240Vac, single phase, 50-60Hz
Regeneration
Regeneration control circuit with built-in regeneration
12Ω/100W resistor
An external regeneration resistor with high power can be
connected. It must be with a minimum 12Ω resistance
The circuit is short circuit and over-temperature protected
Motor Power Supply
- 48V/32A
- 48V/64A
- 96V/32A
- Both 96Vdc/32A and 48Vdc/32A
Drives
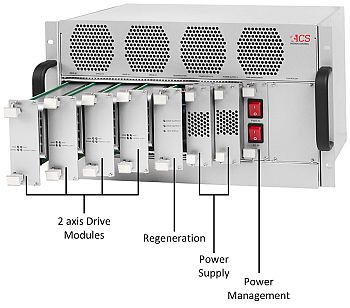
Up to 4 3U plug-in drive modules can be installed in a MP4U enclosure
Up to 8 drives with two drives per one 3U plug-in driver module
The two motor drives on a 3U drive module must drive the same type of motor
Type: three-phase bridge
Switching method: Advanced unipolar PWM
Protections: Short current, over current, over temperature, over voltage, under voltage
Built-in motor phase shortening relays (optional): disconnects the motor phases from the drive and shortens the phases of the motor
Digital I/O
General Purpose Inputs
Two per axis, 5/24V*, opto-isolated, Default: 24V
Limit inputs
One left and one right limit per aixs
Single-ended, 5/24V, sink/source*
Default: 24V, source, Opto-isolated, Input current: 4-14mA
MARK
Two per axis (one primary and one secondary)
Two terminals, 5/24V*, opto-isolated, Default: 24V
Can be used as general purpose digital input
General Purpose / Motor Brake Outputs
One per axis, Opto-isolated, 0.1A per output
Single-ended, 5/24V, sink/source*, Default: 24V, source
Protection: short circuit
PEG (Position Event Generation)
One per axis, PEG Pulse or PEG State
Differential, RS-422
Max. rate: RS422: 10MHz
Programmable pulse width: 26nSec - 1.75msec
Can be used as general purpose outputs
STO (optional)
Two inputs, 24Vdc, 2A supply output for the external drives
Standards (NPM3U): IEC61800-5-2:2016, EN 62061:2005 , EN ISO 13849-1:2008
Motor Types
Two- and three-phase permanent magnet synchronous (DC brushless/AC servo), DC brush, Voice coil, Two- and three-phase stepper (micro-stepping open or closed loop)
Feedback
The following feedback types are supported:
Incremental Digital Encoder
Two per axis (one primary and one secondary), AqB,I and Clk/Dir,I
RS-422
Maximum input frequency: 50 million encoder counts/ sec
Protections: Encoder error, not connected
Incremental Analog SIN-COS Encoder (optional)
Two per axis (one primary and one secondary)
1Vptp, analog differential, 16-bit resolution
Maximum speed – NPM3U: two options: 500kHz or 10MHz
– UDM3U: 500kHz
Protections: Encoder error, not connected
Squared SIN-COS output
One per axis, RS-422
Sharing pins with the corresponding incremental primary incremental
encoder
Absolute Encoder (optional)
One per axis, RS-485
Type: EnDat 2.2 & 2.1 digital only, Smart-Abs, Panasonic, Biss-A/B/C, SSI, Sanyo, Denki ABS
Hall inputs
One set of three per axis, 5V, source, isolated
Input current: <7mA
Analog I/O
Inputs: Four per drive module, ±10V, differential, 12 bit resolution, maximum input frequency 1KHz
Outputs: Four per drive module, ±10V, differential, 16 bit resolution, maximum output frequency 5Khz
|
